
Сотрудничество с Hyundai и новое поколение яндексовского автопилота
Компания Яндекс объявила о сотрудничестве с Hyundai в области беспилотных технологий и показала журналистам первые плоды совместной работы — опытные седаны Hyundai Sonata.
Яндексовские Приусы с характерным горбом на крыше нет-нет, да попадаются на улицах Москвы. На территории Сколково беспилотники даже работают в такси — в опытном режиме, бесплатно. Свой тестовый флот у Яндекса есть даже в Израиле и США: в общей сложности в нём работает 110 машин. К текущему моменту робомобили Яндекса намотали уже 5 миллионов километров.
Недавно среди тестовых машин появилось несколько седанов Hyundai Sonata, а до конца 2020 года тестовый флот расширится ещё на 100 беспилотных «Сонат». Последние несколько месяцев специалисты Яндекса вместе с инженерами подразделения Hyundai Mobis работали над интеграцией своего беспилотного обвеса с электронными системами корейского седана.


О подробностях проекта, новой системе, разработках и перспективах беспилотных технологий мы поговорили с Артёмом Фокиным — директором по развитию бизнеса беспилотных автомобилей Яндекса. Увы, личной встречи не получилось: из-за пандемии пришлось беседовать по Зуму…
Артём рассказал, что работы над Сонатой не ограничились просто созданием и отладкой электронного интерфейса. Ради более гладкого взаимодействия систем корейцы перенастроили практически всю бортовую электронику: сделали свои прошивки для электроусилителя руля, системы контроля скорости и даже генератора (поскольку управляющий автопилотом компьютер потребляет много электроэнергии).
Новый не только автомобиль-носитель, но и сам автопилот — то, что яндексовцы на своём жаргоне называют «беспилотный обвес»: управляющий компьютер (с двумя серверными процессорами и тремя видеокартами для GPU-вычислений), целый набор датчиков, дающих данные для автопилота, и интерфейс для взаимодействия с автомобилем. Кстати, в компании настаивают — для качественного автопилота не нужен скоростной мобильный интернет, и в яндексовской системе все вычисления ведутся исключительно на борту машины, чтобы перебои со связью не могли нарушить работу беспилотника.
Как и большинство нынешних беспилотников, яндексовский ориентируется по картам высокого разрешения (каждая команда разработчиков обычно создаёт свои). У них два слоя: навигационный, который служит для прокладки маршрута, и локализационный. Последний нужен, чтобы автопилот «узнал» своё местоположение: вместо GPS, который легко сбить с толку помехами, используется особый алгоритм. Его работа похожа на то, как человек узнаёт своё положение, оглядываясь по сторонам и видя ориентиры.

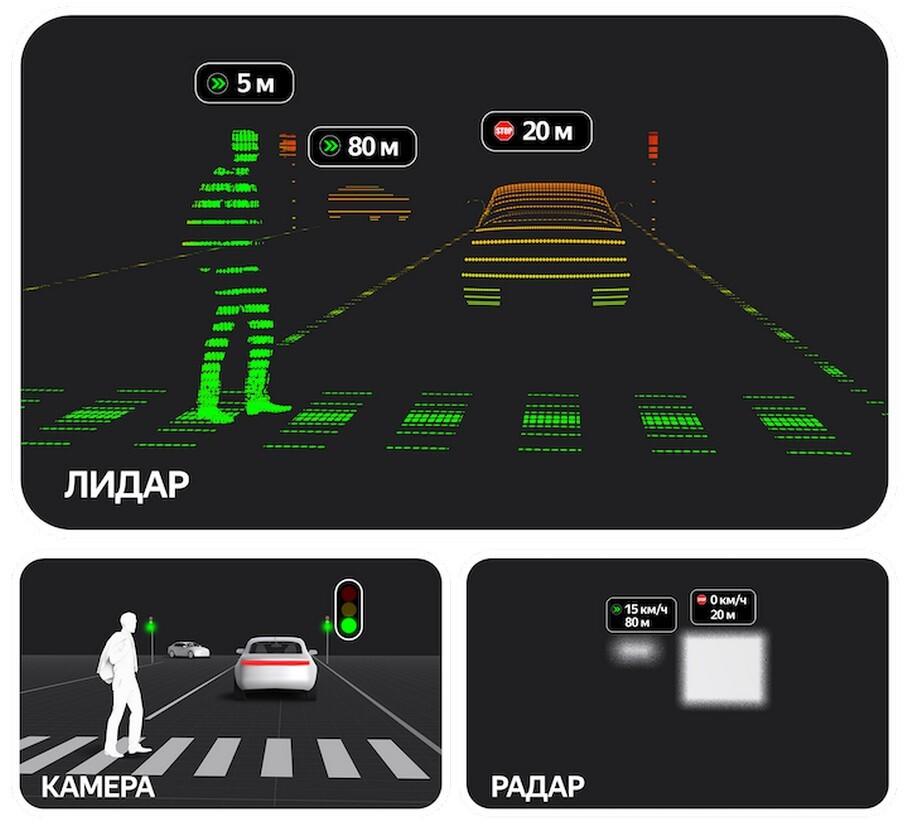
На Сонатах стоит уже четвёртое поколение яндексовской системы. Основная разница в новом наборе сенсоров: количество камер увеличено с шести до девяти, причём использована оптика с разным фокусным расстоянием, установлено шесть радаров и четыре лидара (высокоточное сканирующее устройство на основе лазера).
Необходимость дублировать «органы чувств» в разных диапазонах — давно уже консенсус среди создателей автопилотов. Опираться на одни лишь камеры нельзя — их могут легко сбить с толку тени на асфальте или ослепить солнце. Не верите? Посмотрите ролик, как над тесловским автопилотом издеваются при помощи рисунков на асфальте! Радары тоже не годятся — среди препятствий могут попасться радио-прозрачные: например, даже тентованную фуру он скорее всего не увидит, не говоря уже о пешеходах. Да и лидары имеют свои недостатки. Но нюансы есть даже с тем, как именно ставить датчики!
Говорят, что главной задачей новой версии было улучшить распознавание мелких объектов в «ближней зоне». Иными словами, избежать самой страшной ситуации — когда в тесноте двора машина наезжает на пешехода, особенно ребёнка. Для этого использовали сразу несколько трюков: расположенный на крыше лидар кругового обзора подняли ещё выше, а радары и лидары бокового обзора вынесли вперёд на подиумах — так они могут «выглядывать» при выезде из узкого проезда. Вдобавок, их угол обзора стал больше 180 градусов. То есть область обзора разных сенсоров перекрывается, за счёт чего растёт точность распознавания.

Хотя, по словам Фокина, самое сложное — даже не сделать автопилот безопасным, а научить его принимать решение и… всё-таки ехать. «Многие команды хвалятся безопасностью своих автопилотов, но на реальной улице они будут просто беспомощны и не смогут тронуться с места — всё время что-то будет мешать, — рассказывает Артём, — Нужно обучить беспилотник вести себя как опытный водитель: встраиваться в плотный городской поток, уметь вовремя ускориться, к месту перестроиться — в общем, предсказывать поведение других водителей, их взаимодействие между собой и пешеходами». Фокин приводит пример: если далеко впереди на дорогу выходит пешеход, то автопилот должен заранее понимать, что окружающие машины начнут тормозить — а не принимать решение пост-фактум.
Как раз поэтому автопилот «натаскивают» в реальных дорожных условиях разных городов. Москва хороша своим непредсказуемым движением, снежной погодой и грязью по весне, а Тель-Авив — слепящим солнцем и невероятным количеством двухколёсных (мотоциклов, скутеров и велосипедов). Тесты на симуляторах тоже проводятся, но только для проверки базового функционала.

Ребята из Яндекса рассказывают, что на беспилотнике особенно чувствуется разница между стилями вождения в том или ином городе: «Когда в прошлом году во время выставки электроники CES машину с московскими настройками впервые выпустили на улицы Лас-Вегаса, один из участников демо-заезда удивился — вау, как дерзко она перестраивается! Но затем автопилот довольно скоро адаптировался к местным порядкам».
Кстати, в июне этого года роботакси Яндекса должны были обслуживать Детройтский автосалон: кто-то из руководства выставки прокатился на беспилотнике во время выставки CES, и так впечатлился, что попросил поработать и в Детройте. Благо, в штате Мичиган законы позволяют беспилотникам ездить без водителя. Но из-за эпидемии автосалон отменили, а в залах Кобо-Холла обещали развернуть госпиталь.
А когда бесконечные эксперименты увенчаются созданием итогового продукта? Артём Фокин смотрит на это крайне оптимистично: он считает, что автопилот будет полностью готов «через единицы лет» — возможно, 2–3 года. Хотя, скажем, когда я два года назад беседовал с Дженсеном Хуангом — руководителем фирмы Nvidia, производящей «железо» для большинства автопилотов — то он предполагал, что создание полноценного автопилота может очень затянуться.
Выходит, через три… Ну хорошо, допустим, через пять лет автопилот от Яндекса начнут ставить на серийные Hyundai? Но нет, таких амбиций у компании в принципе нет. Идея другая — стать провайдером службы роботизированных такси. Идеальный сценарий в компании видят таким: всё оборудование автопилота ставится уже на конвейере, а Яндекс только поставляет сервис.

В реальности компания даже ведёт разработку собственного «железа» — а конкретно, лидара. Сейчас среди всех сенсоров он самый дорогой: цены в районе 4 тысяч евро в порядке вещей. В Яндексе разрабатывают устройства сразу двух типов: классические с вращающимся зеркалом — дающие круговой обзор, но хрупкие и дорогие, и так называемые твердотельные лидары — перспективные более дешёвые устройства на микрозеркалах (с углом обзора 120 градусов).
И у людей из Яндекса есть любопытные задумки. Например, лидар с изменяемым паттерном сканирования: проще говоря, устройство способно увеличивать разрешение в той или иной области, как бы «сосредотачивая внимание» на объекте — так, как это делает человек.
В Яндексе рассуждают о нескольких параллельных явлениях, которые обязательно приведут к появлению службы роботизированных такси: с одной стороны, для многих обладание личным автомобилем становится всё менее привлекательным, а с другой — всё меньше людей готовы становиться профессиональными водителями (скажем, в грузоперевозках есть дефицит кадров).
Всё это верно, но… в первую очередь — за рубежом, а не в России: у нас-то и люди всё ещё голодны до автомобилей, да и недостатка в таксистах не будет ещё долго. Но амбиции у Яндекса вполне планетарные.